Velocity control for low power robotic applications Daniel Matías Delgado Bellamy 0:37 6 years ago 49 Далее Скачать
Control techniques of a Fetch robot for surface disinfection. Alan Giovanny Sanchez 1:55 4 years ago 107 Далее Скачать
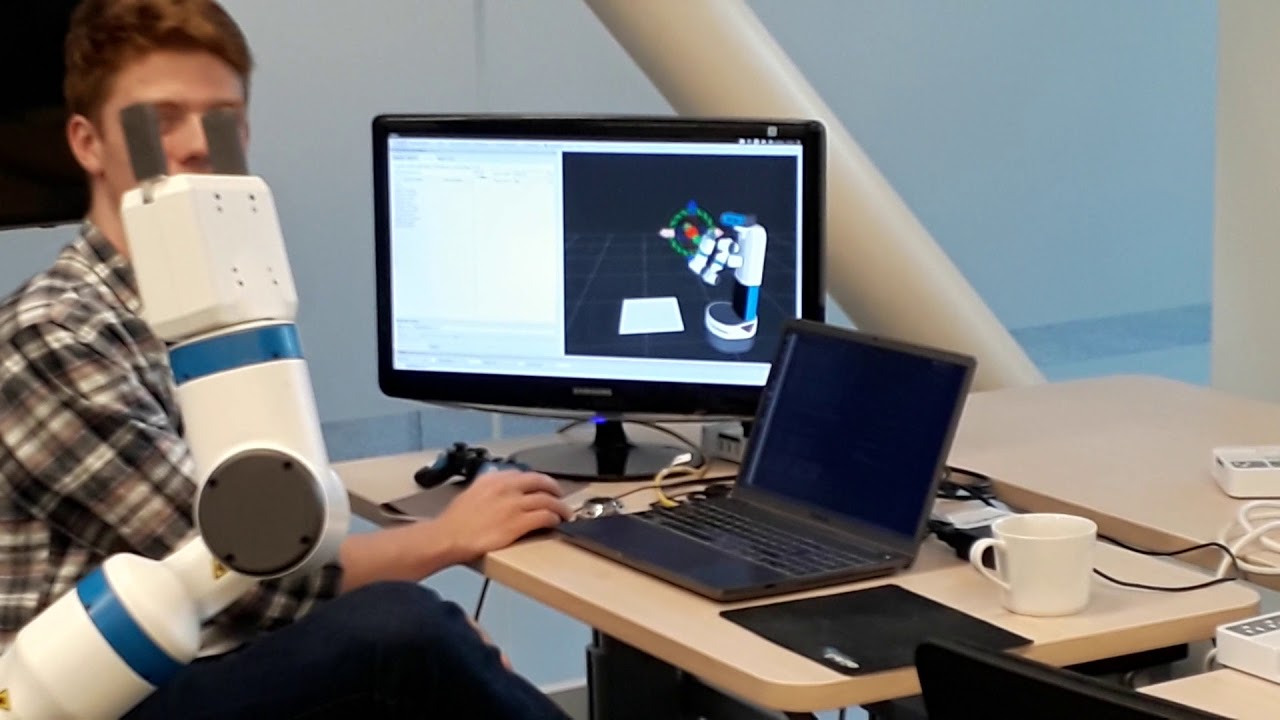
Hybrid Force/Velocity Control for Physical Human-Robot Collaboration Tasks RoboticsLabSapienza 1:23 8 years ago 1 190 Далее Скачать
Saturated control without velocity measurements for Philips Experimental Robotic Arm Carmen Chan 0:20 4 years ago 41 Далее Скачать
Whole-Body Control for Velocity-Controlled Mobile Collaborative Robots Robotics & AI Lab - CUHK Shenzhen 3:12 2 years ago 1 193 Далее Скачать